Under Pressure: Learning to Detect Slip with Barometric Tactile Sensors
Abstract
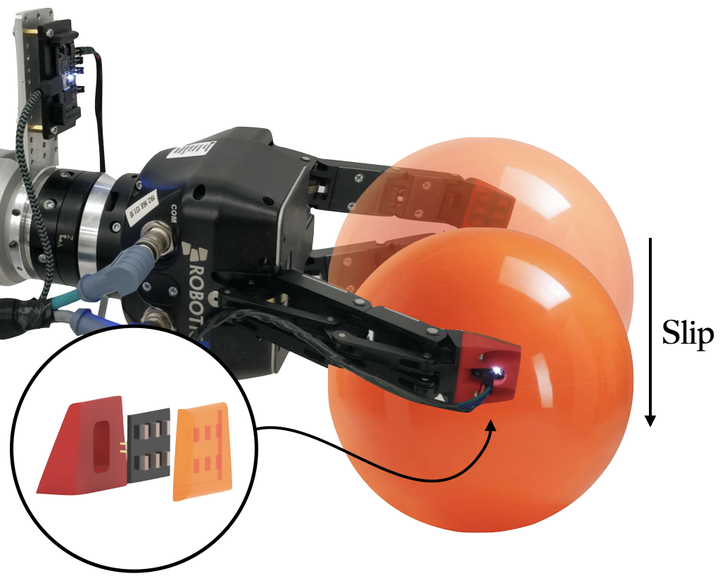
The ability to perceive object slip through tactile feedback allows humans to accomplish complex manipulation tasks including maintaining a stable grasp. Despite the utility of tactile information for many robotics applications, tactile sensors have yet to be widely deployed in industrial settings – part of the challenge lies in identifying slip and other key events from the tactile data stream. In this paper, we present a learning-based method to detect slip using barometric tactile sensors. These sensors have many desirable properties including high reliability and durability, and are built from very inexpensive components. We are able to achieve slip detection accuracies of greater than 91% while displaying robustness to the speed and direction of the slip motion. Further, we test our detector on two robot manipulation tasks involving a variety of common objects and demonstrate successful generalization to real-world scenarios not seen during training. We show that barometric tactile sensing technology, combined with data-driven learning, is potentially suitable for many complex manipulation tasks such as slip compensation.
Abhinav Grover
Machine Learning Engineer
Machine Learning and Robotics enthusiast, currently building 3D reconstruction tools for Applied Intuition.